
Interactive online trajectory planning
With a standard trajectory assistant, the route of the ship is usually handcrafted before the journey and can only be adjusted to a limited extent afterwards. The goal of RWTH in this work package is therefore to develop a superimposed, permanent trajectory planning for the short future time horizon, which is able to propose multiple collisionfree and energy-saving trajectories by taking the current traffic situation and environmental disturbances e.g., wind velocity and water current into account. With an interactive input interface, the operator in a remote control center can incorporate his expert knowledge in special situations. Another objectiv of this assisted intelligent ship guidance is that the operator can be relieved from a permanently active ship guidance and thus only plays a supervising role. In the future, this may also enable remote control of several ships by a single ship operator.
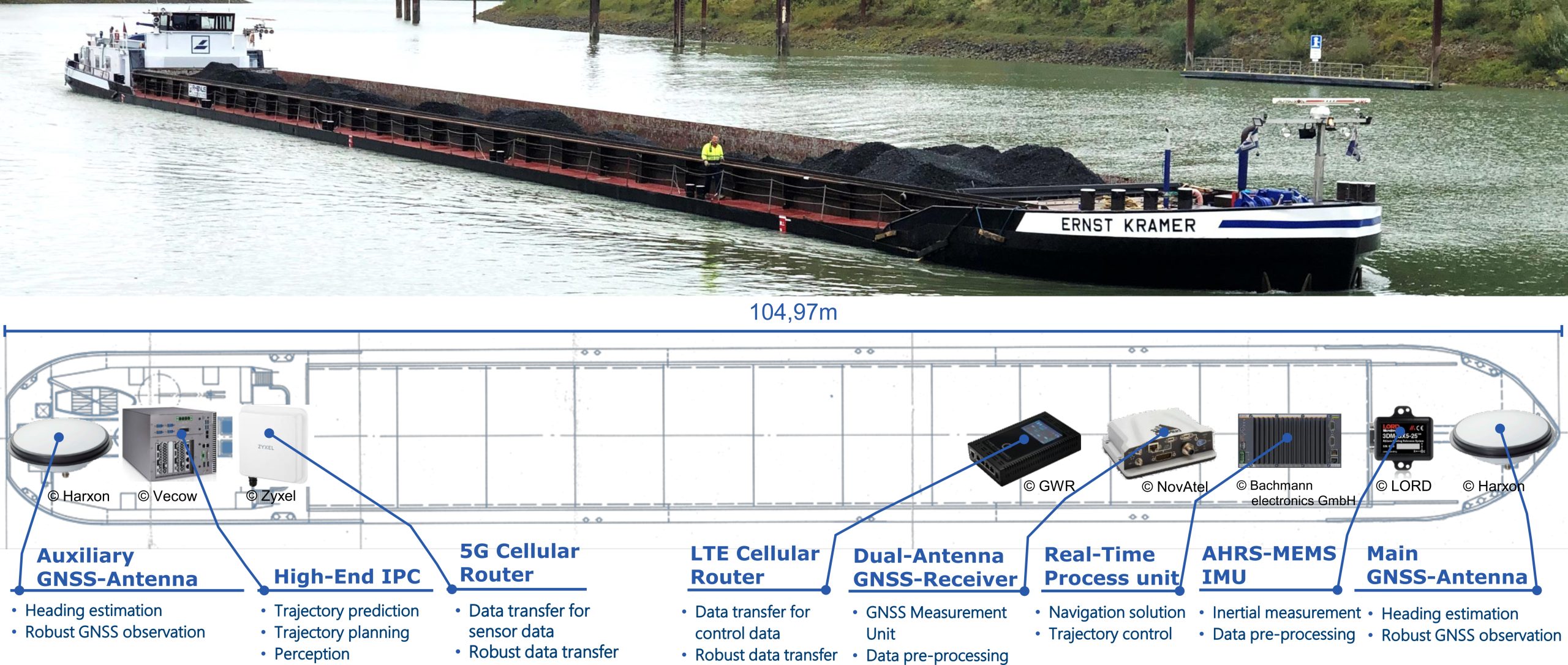
Hardware equipment (sensors, actuators, communication)
Trajectories from AIS data
Evaluation man-control station control station







