


A microscopic traffic simulation of inland shipping based on “live”-data by ingenieurbüro kauppert
As part of of the research project “FernBin” a microscopic traffic simulation called “mikroVon” is under development.
The project is based on a well evaluated model that is working with static data. “mikroVon” is the next step to a dynamic model that uses “live”-data on ship traffic.
The development of remote-controlled and autonomous ships demands for methods to manage the traffic and ensure safety on waterways. Especially mixed traffic with participation of humans and autonomous systems can cause critical situations.
A traffic simulation with forecast of encounters of ships can predict critical situations and produce automated warnings so the helmsman or automated system can adopt the ships course and speed. A main goal of the project is the application of „live“-traffic data to reflect the number, positions, movements (and destination) of vessels on the considered stretch or a waterway network. Apart from “live”-traffic data, current gauge data, infrastructure data, traffic rules and waterway geometry is used to model the actual state of the waterway.
Based on this data, the simulation performs the forecast of traffic, regarding the prognosis of passage times and arrivals and the estimation of future interactions between vessels. The predictions are consecutively assessed to evaluate route utilization, safety and ease, etc.
Methodical Approach – Cascaded runs
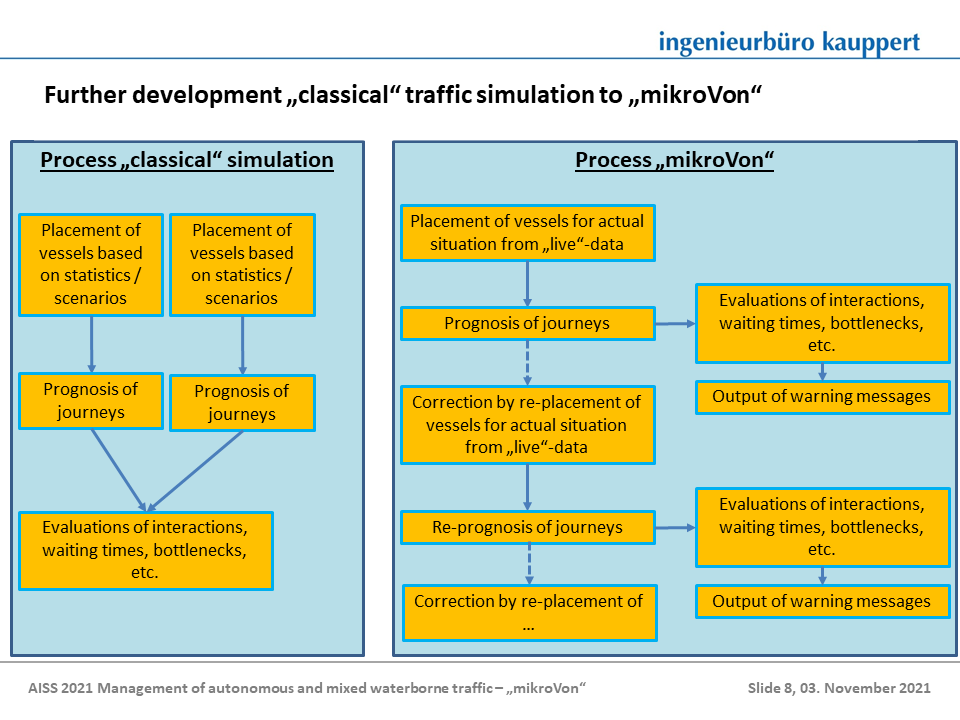
Figure 1: Comparison of process schemes of “classical simulations” and “mikroVon”
The accuracy of the prognosis of a simulation run decreases with longer prediction time. To always have the best possible forecast, the simulation runs are operated in cascades. A new simulation run starts in regular intervals including updated “live”-data (AIS).
“Classical” traffic simulations are based on static data and perform simulation runs for a given period, ideally with a variation of start conditions to cover uncertainties. This process is well suited to produce statistically correct results, for example to detect bottlenecks along a waterway. To consider single trips and incidents like an interaction of vessels, the input data and calculation process of a “classical” traffic simulation is not sufficient because individual ships may behave unpredictable for example by mooring or changing waterways.
To highlight the benefit from cascaded runs within “mikroVon” in contrast to a “classical” simulation, the process schemes are shown in Figure 1.
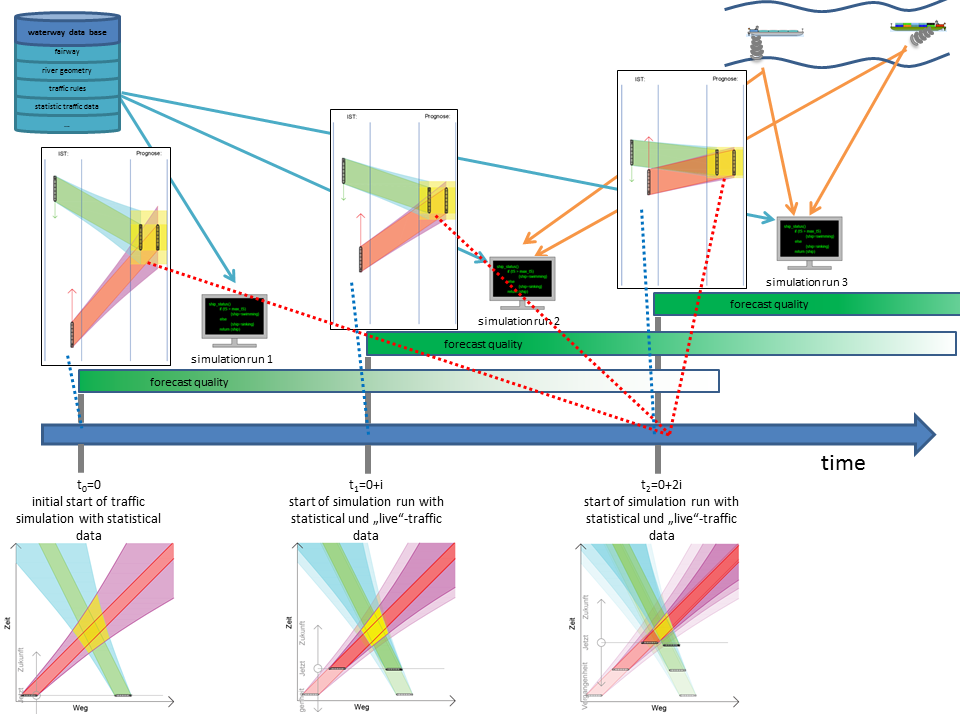
Figure 2: Cascaded runs of traffic simulation to obtain highest forecast quality
First Results
While the project is still in the development phase, several test runs with AIS-data and simplified waterway data have been performed to validate the cascading simulation runs.
First results show large improvements for the prognosis of ship positions and interactions between ships. Predictions of areas of encounterings between ships are more precise and give better information for traffic observations or remote controlled shipping.
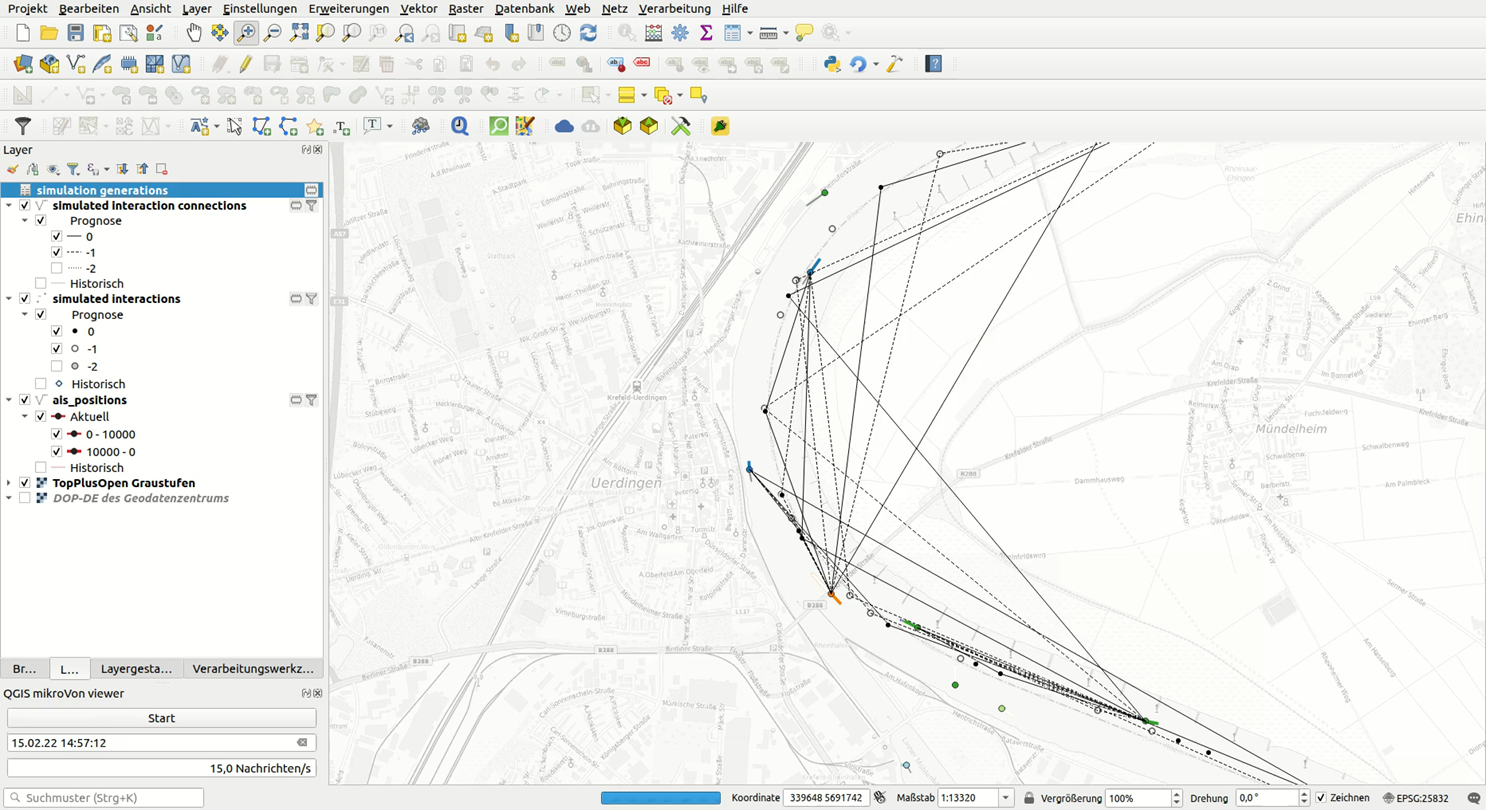
Figure 3: -VIDEOFORMAT TO BE COORDINATED BETWEEN DST AND IBK





