
Highly accurate and robust navigation solution
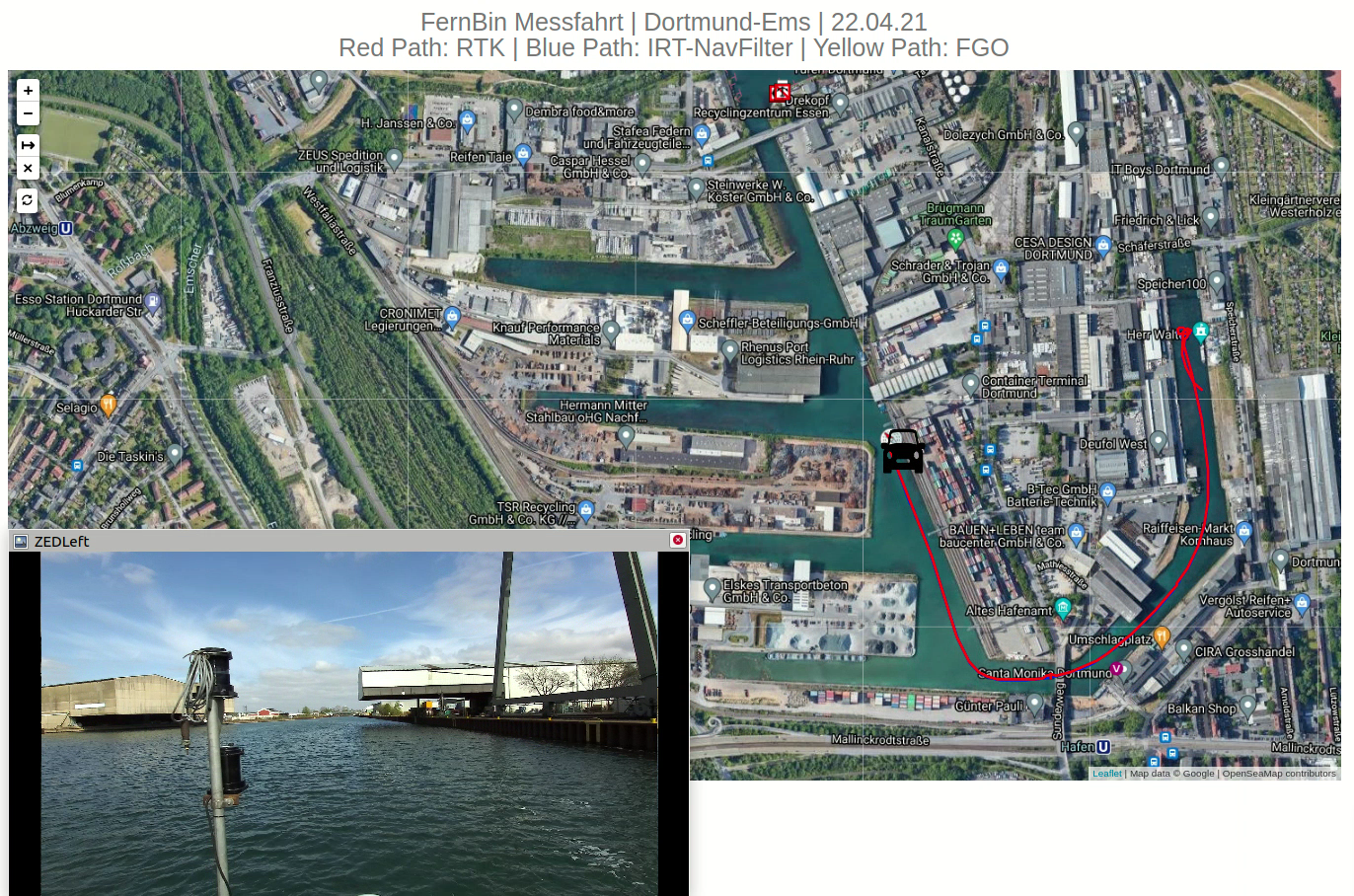
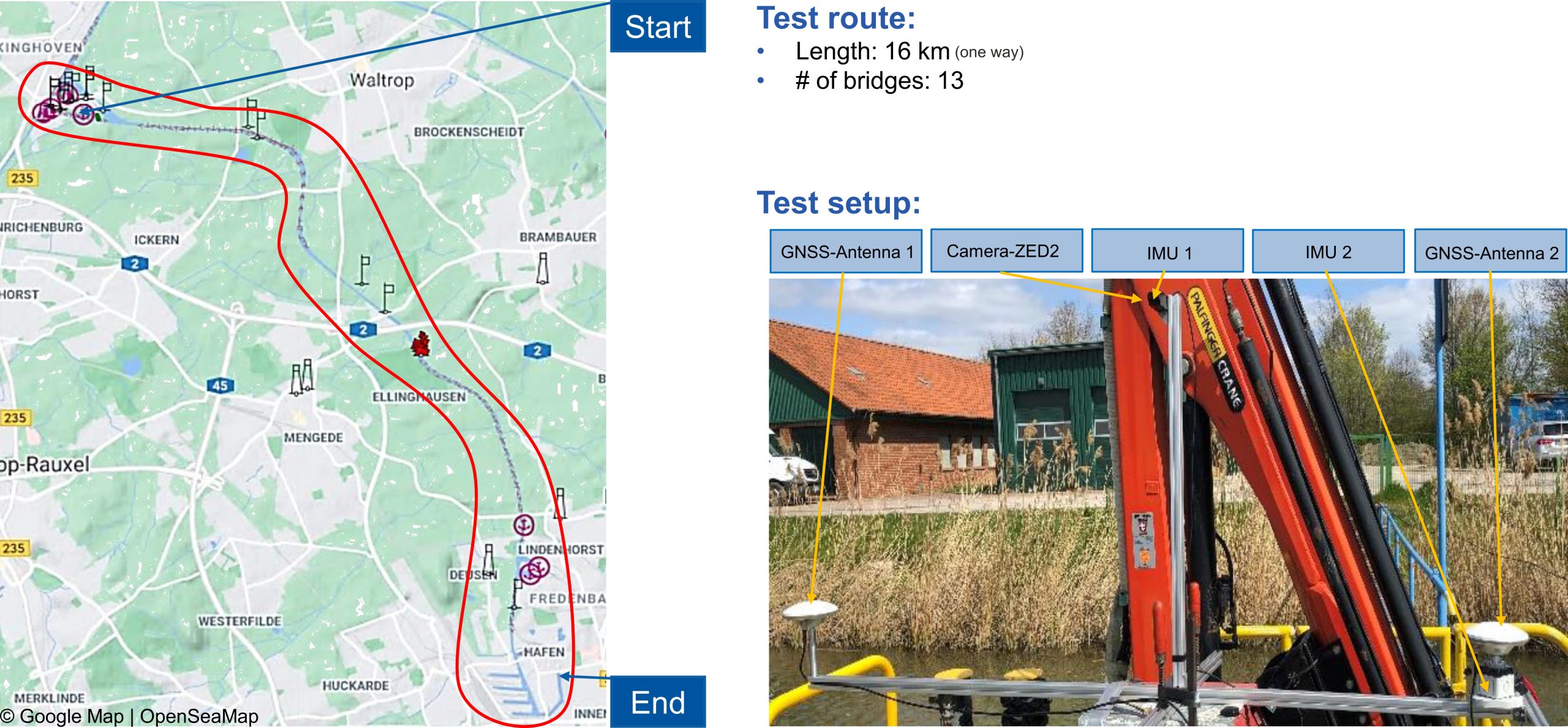
The realization of the remote-controlled and, in the future, also automated ship is largely based on precise knowledge of the current speed, position and orientation of the ship. This data must be continuously available with high accuracy. To archive this, the RWTH proposes a robust sensor fusion technology with tightly-coupled integration of the sensor measurements from a Global Navigation Satellite System (GNSS) receiver, inertial measurement unit (IMU) and other data sources. Furthermore, it is being investigated how faulty navigation sensor data can be reliably detected in order to guarantee the integrity of the sensor data fusion.
Hardware equipment (sensors, actuators, communication)
Trajectories from AIS data
Evaluation man-control station control station







