
Hochgenaue und robuste Navigationslösung
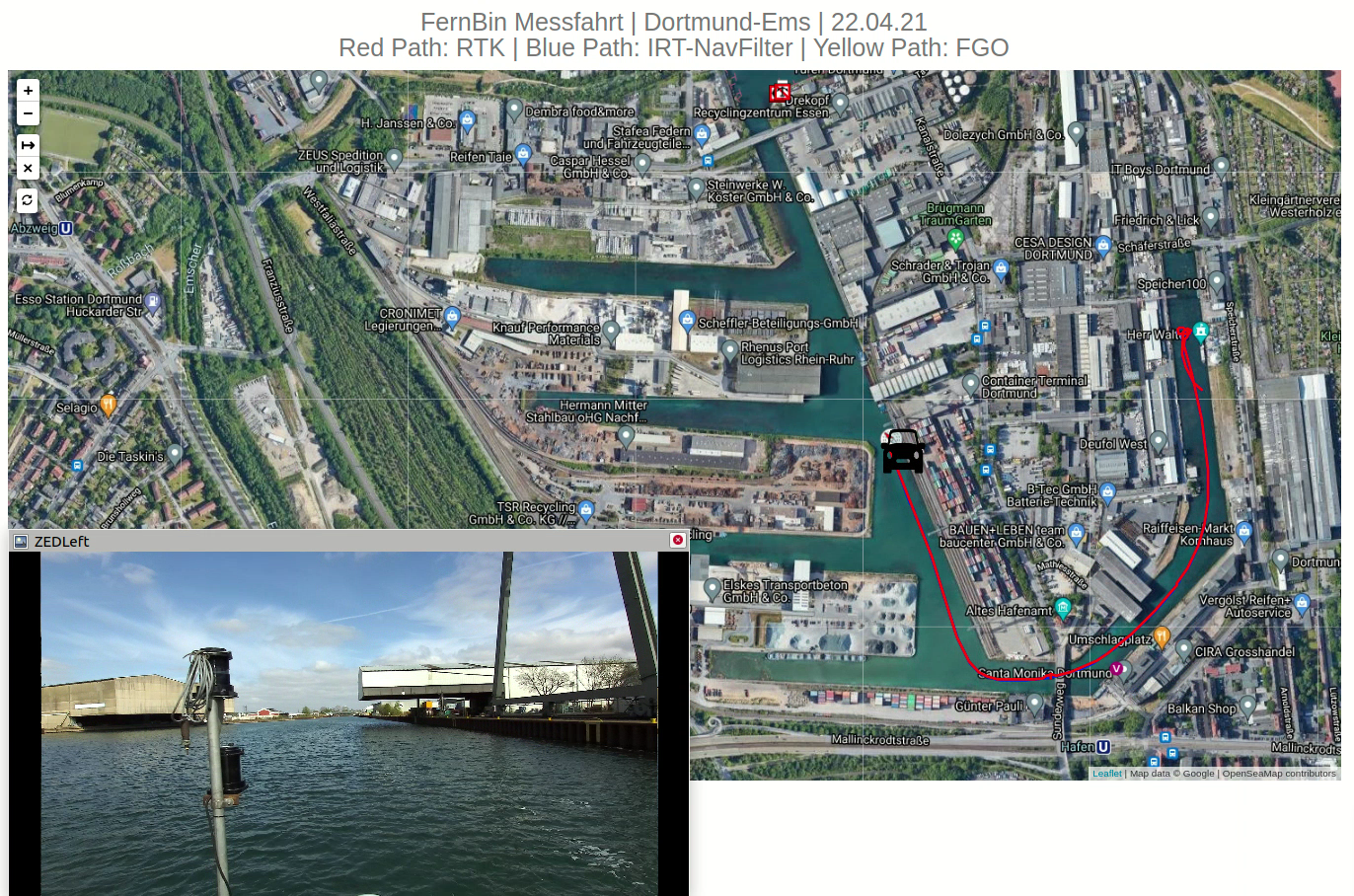
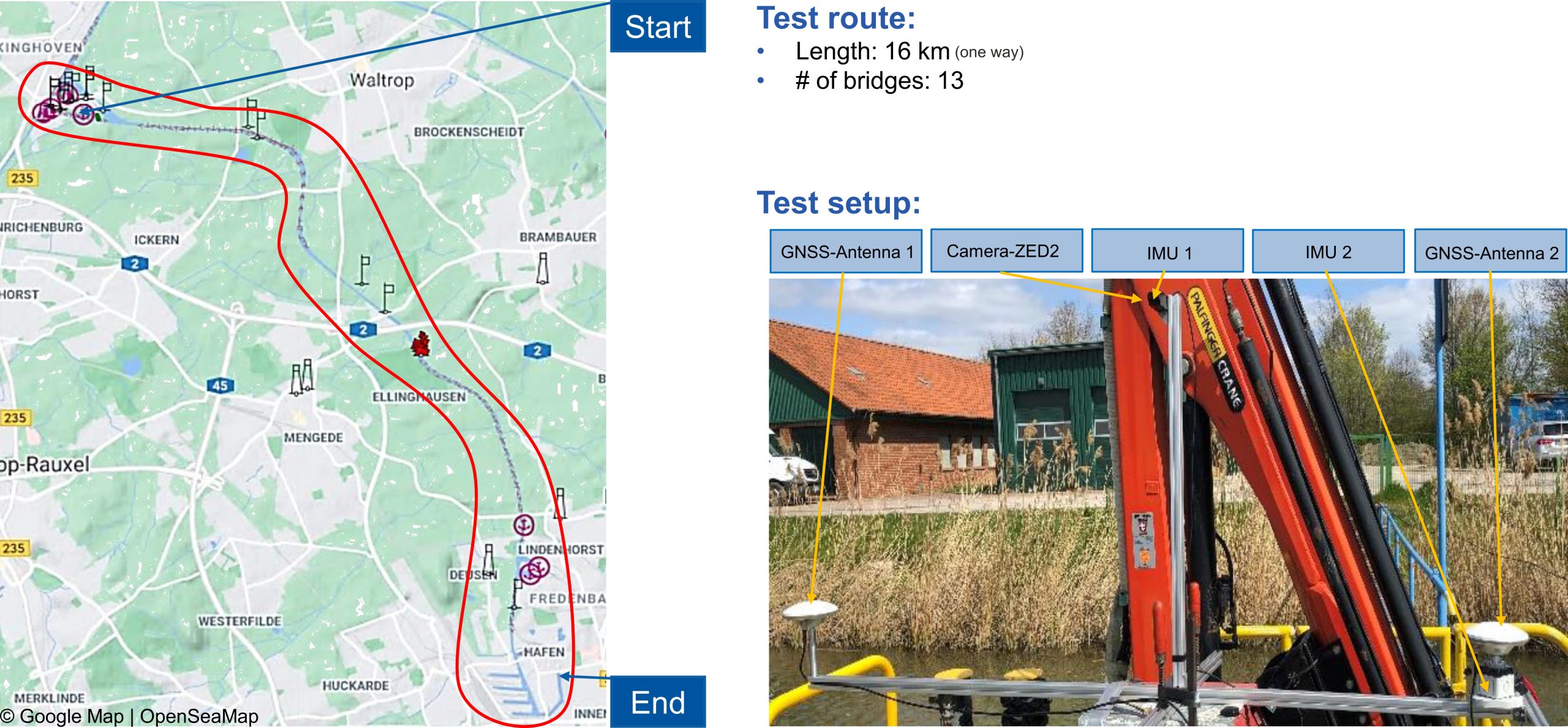
Die Umsetzung des ferngesteuerten Schiffs basiert maßgeblich auf einer genauen Kenntnis der aktuellen Position, Ausrichtung und Geschwindigkeit des Schiffs. Diese Daten müssen mit hoher Genauigkeit und ohne Aussetzer verfügbar sein, um einen sicheren Betrieb ermöglichen zu können. Die RWTH überträgt in diesem Arbeitspaket bereits vorhandene Ansätze aus anderen Forschungsprojekten zur robusten und genauen Lokalisierung auf den vorliegenden Fall und nimmt Anpassungsarbeiten vor. Die bestehenden Ansätze umfassen eine sogenannte enge Kopplung zwischen den Daten eines Satellitennavigationsempfängers und Inertialsensorik. Die Genauigkeit und Zuverlässigkeit der Sensorfusion werden unter verschiedenen Bedingungen bewertet. Als Weiterführung der bestehenden Ansätze wird im Rahmen des Forschungsprojektes erforscht, wie fehlerhafte Navigationssensordaten detektiert werden können und die Integrität der Lokalisierung verbessert werden kann. Dazu wird untersucht, ob die identifizierten Schiffsmodelle und die Nahfeldsensorik verwendet werden können.
Hardwareausrüstung (Sensorik, Aktorik, Kommunikation)
Evaluierung Mensch-Steuerstand-Leitstand







