


Im Rahmen des Arbeitspaketes 2200 wurde die Systemarchitektur für das ferngesteuerte, koordinierte Fahren in der Binnenschifffahrt entworfen. Zunächst wurde das System in seine essenziellen Module untergliedert:
In Absprache mit den jeweiligen Verbundpartnern wurde tabellarisch festgehalten, welche Systemgrößen für die Realisierung und Entwicklung der jeweiligen Module benötigt werden und welche Informationen aus den Modulen hervorgehen. Soweit möglich, wurden die Zugriffsart, das Datenformat, die Auflösung, die Genauigkeit und die Aktualisierungsrate definiert. Anhand der definierten Ein- und Ausgangsgrößen wurden die jeweiligen Kommunikationspartner, Sender und Empfänger, abgeleitet. Zur Definition der Schnittstellen wurden neben den einzelnen Modulen des Systems, angrenzende Instanzen, welche nicht Bestandteil des Systems sind berücksichtigt.
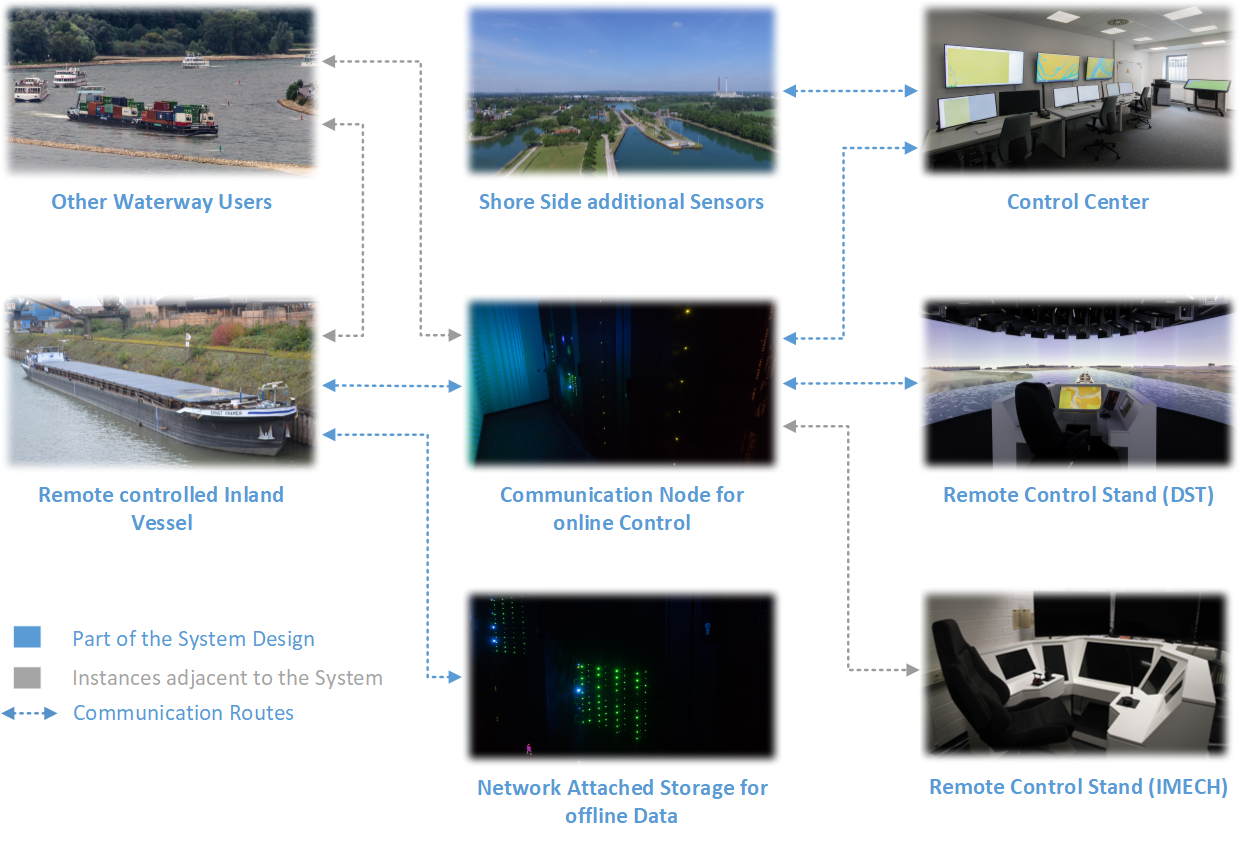
In Abbildung 1 sind die Instanzen, die Bestandteil des Systems sind, sowie angrenzende Instanzen, die Schnittstellen zum System besitzen dargestellt. Für eine möglichst effiziente Kommunikation zwischen Landseite und Schiff wird ein zentraler Kommunikationsknotenpunkt vorgesehen. Die kabellose Kommunikation zwischen Landseite und Schiff stellt einen Engpass dar. Durch einen zentralen Kommunikationsknotenpunkt wird die Notwendigkeit einer mehrfachen Übertragung von Daten vermieden. Der zentrale Knotenpunkt stellt verschiedene Informationen den Instanzen auf der Landseite zur Verfügung.
Für die Fernsteuerung und Koordinierung werden die Module “Ferngesteuertes Schiff”, “Kommunikationsknotenpunkt – online Steuerung”, “Leitstelle “, “Landseitige Zusatzsensoren” und “Fernsteuerstand” benötigt. Die Entwicklung einzelner Subsysteme erfordert im Vorhinein verschiedene Daten, die auch im Rahmen des Projektes generiert werden. Um die Daten zur Verfügung zu stellen, wird ein weiterer Kommunikationsknotenpunkt vorgesehen. Dieser besitzt keine Anforderungen hinsichtlich Echtzeit. Landseitig werden diese Daten aufbereiten und in einem Network Attached Storage zu Verfügung gestellt. Auf Basis dieser Daten werden einzelne Algorithmen entwickelt. Insbesondere der Funkverkehr zu anderen konventionellen Verkehrsteilnehmern wird in der Systemarchitektur als Schnittstelle berücksichtigt. Perspektivisch sind auch eigene Protokolle für Kommunikation zu weiteren ferngesteuerten und automatisierten Schiffen vorzusehen.
Modulübergreifend wurde die Kommunikation festgelegt: Auf Schiff, Fernsteuerstand und Leitstelle wird über ein VPN ein gemeinsames logisches Netzwerk realisiert. Den einzelnen Modulen, welche miteinander kommunizieren, werden feste IP-Adressen zugewiesen. So können auch Verbindungsabbrüche durch die Verfügbarkeit im Netzwerk auch einseitig erkannt werden. Als Standard für den Datenaustausch wird die „Open Plattform Communications Unified Architektur“ übergreifend verwendet. Diese ist plattformunabhängig und bietet Diagnosedaten zur Identifizierung fehlerhafter Übertragungen.





