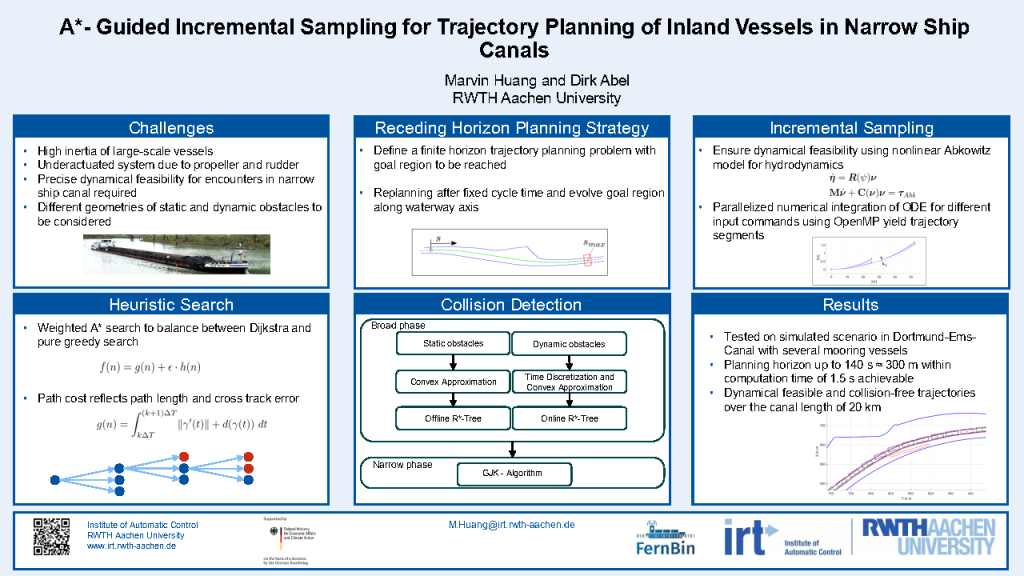
While substantial research on trajectory planning for large scale vessels on maritime environment has been conducted, the research on inland waterways has been limited to small vessels. For large scale vessels in ship canals, the narrow canal width in comparison to the large geometries of inland vessels require a dynamically feasible trajectory planning to avoid collisions with static and dynamic obstacles. Thus, the use of an accurate vessel model for motion planning to ensure the dynamical feasibility is desirable. In this regard, the Abkowitz model is one of the classic models used in the study of ship maneuvring, especially in calm water environments. However, the nonlinear model structure makes the model-based trajectory planning challenging, as most trajectory planning methods either rely on specific model structures or require fullyactuated vessels. In this paper, we introduce an incremental sampling method for the trajectory planning of rudder-steered and therefore underactuated surface vessels when sailing in ship canals. The trajectory planning is based on an heuristic tree search along the tubular geometry of ship canals. The discretization of input value and the prediction horizon transforms the trajectory planning into a minimum-cost graph search on a tree structure, which is partially explored using weighted A*-search. Efficient collision detection is added by applying computer graphic strategies. An evaluation for a large scale vessel is shown in a simulation study on the Dortmund- Ems-Canal. The proposed method finds a dynamic feasible local trajectory with a horizon of several hundred meter, avoiding both dynamic and static obstacles. This opens the possibility to extend autonomous driving to commercial vessel operations in inland waterways.