Reales Testfeld
Schritt für Schritt wird das autonome Fahren Realität.
Der zweite Schritt
Wenn die Entwicklung der automatisierten Steuerungstechnik im virtuellen Testfeld soweit fortgeschritten ist, dass sie in den Simulationen zuverlässig funktioniert, erfolgt die Erprobung und Weiterentwicklung im realen Testfeld auf einem realen Schiff.
Diese Testfahrten erfolgen immer unter der Aufsicht eines erfahrenen Schiffsführers, der bei Fehlfunktionen an Bord jederzeit eingreifen und Schaden abwenden kann.

Testfeld Rhein-Ruhr
Anders als beim Straßen- oder Schienenverkehr wäre es nur mit einem erheblichen Aufwand möglich, ein Testfeld für Binnenschiffe auf der grünen Wiese neu zu bauen. Als Testfeld muss also ein vorhandenes Binnengewässer genutzt werden.
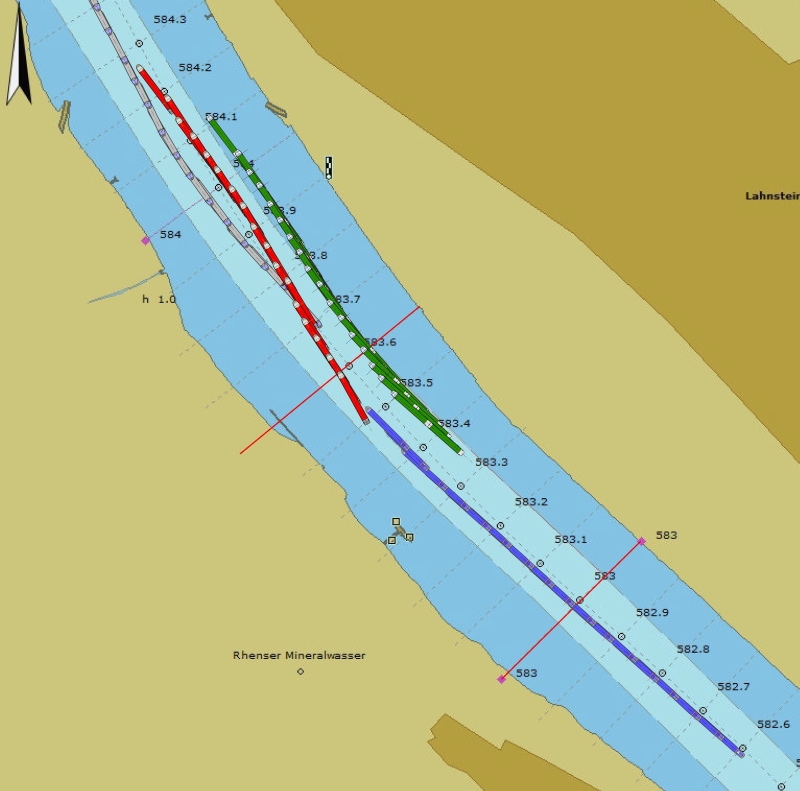
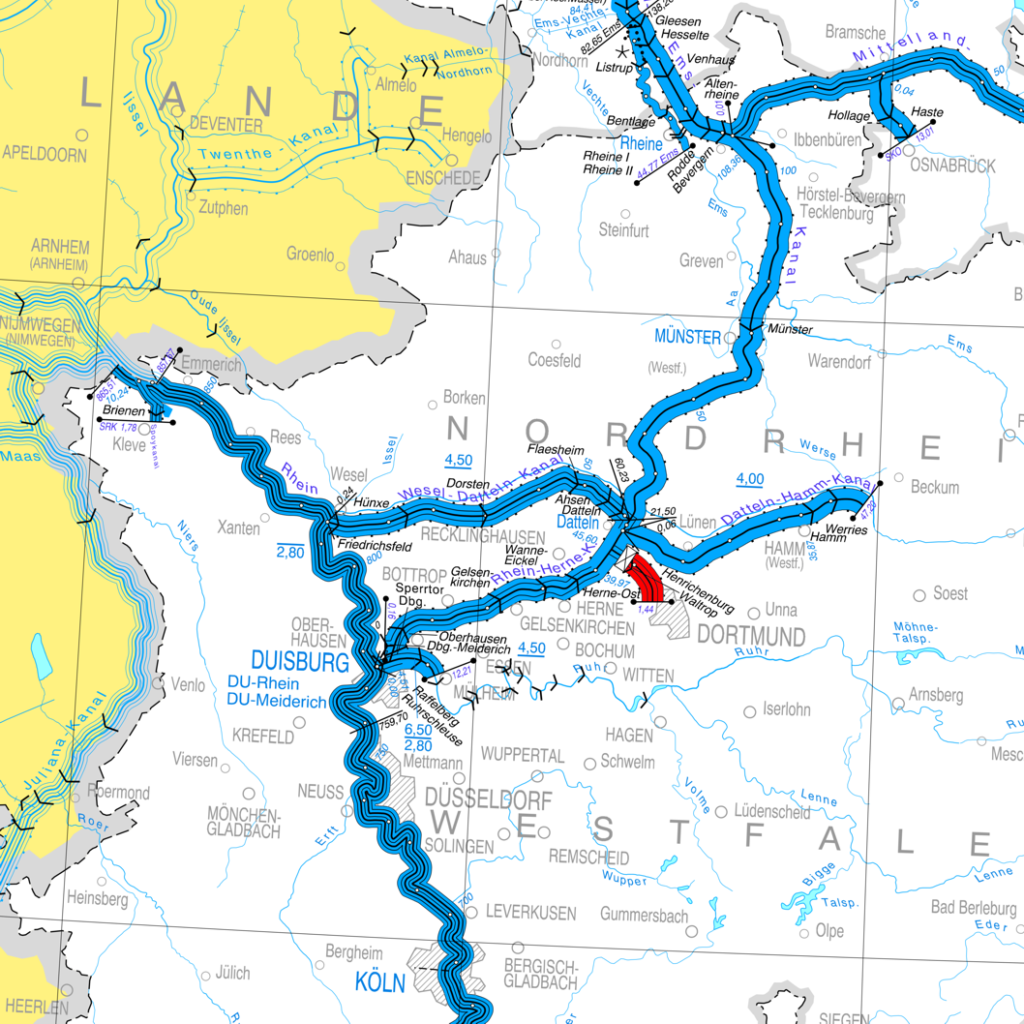
Als geeignetes Testfeld wurde das südliche Ende des Dortmund-Ems-Kanals – also der Abschnitt zwischen dem Hafen Dortmund und der Schleuse Waltrop – identifiziert. Es handelt sich hierbei um einen menschengemachten Kanal, in dem der Wasserstand nahezu konstant und die Bodentopographie regelmäßig und genau definiert ist. Außerdem sind hier keine komplexen Strömungsverhältnisse im Wasser zu finden. In diesem Abschnitt des Dortmund-Ems-Kanals herrscht auch nur eine mäßige Verkehrsdichte.
Damit lassen sich in diesem Testfeld Szenarien verschiedener Komplexität erproben. Wenn die Tests im Testfeld erfolgreich waren, kann die Erprobung über den Rhein-Herne-Kanal in Richtung Rhein erweitert werden, wo schließlich auf dem Rhein mit sein komplexen Strömungsverhältnissen, wechselnden Wasserständen und hoher Verkehrsdichte die höchsten Schwierigkeiten an das automatisierte Fahren gestellt werden.
Was macht ein Testfeld aus?
Das Testfeld ist zunächst eine normale Binnenwasserstraße, die von jedem Schiff regulär befahren werden darf.
Die Erprobungsfahrten stellen aber weitere Ansprüche an das Testfeld. So muss lückenlose Mobilfunkabdeckung sicher gestellt sein. Außerdem existieren für das Testfeld hochgenaue Topographiedaten.
Die Erprobungsfahrten werden dann zeigen, ob die Sensorik an Bord in der realen Umgebung eine genaue Umwelt- und Positionserkennung ermöglicht oder ob für das automatisierte Fahren zusätzliche Navigationszeichen entlang der Wasserstraße installiert werden müssen.