


A*-guided Incremental Sampling for Trajectory Planning of Inland Vessels in Narrow Ship Canals, Marvin Huang and Dirk Abel
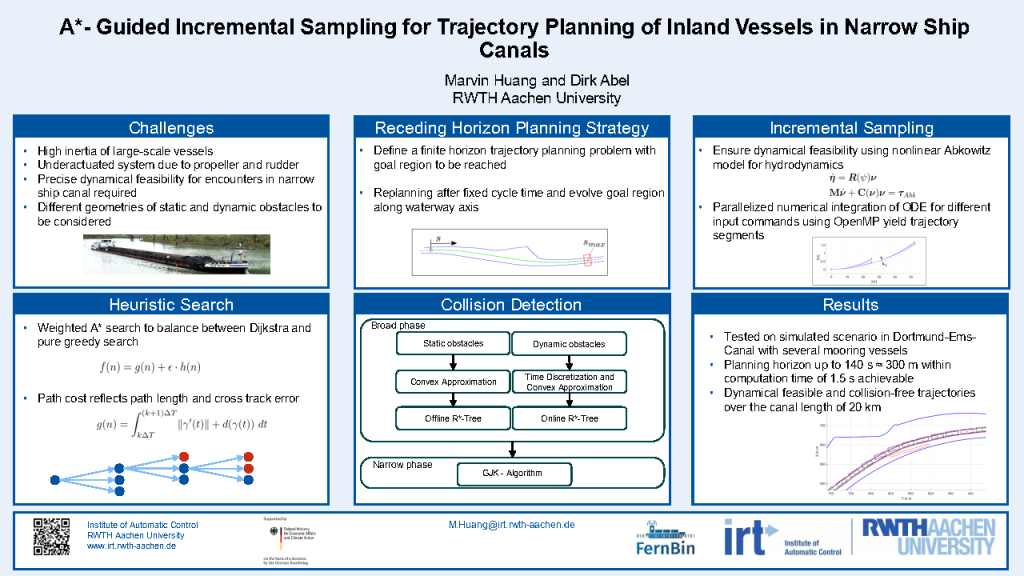
While substantial research on trajectory planning for large scale vessels on maritime environment has been conducted, the research on inland waterways has been limited to small vessels. For large scale vessels in ship canals, the narrow canal width in comparison to the large geometries of inland vessels require a dynamically feasible trajectory planning to avoid […]





